
Autonomous Sumo Robot Project – V03 (3rd generation)
CURRENT STATUS
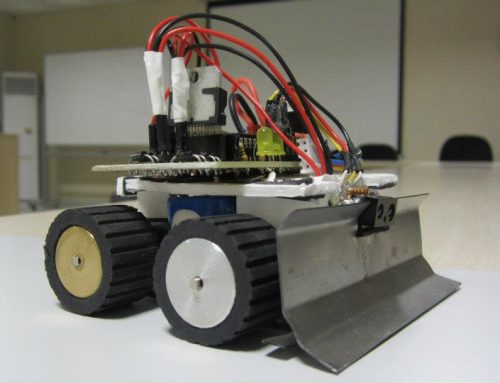
Design is changed from 4 motors design to 2 motors design (August 2017). Details are in below.
PROJECT DETAILS :
Components
+ Arduino Uno
+ Motor Shield L293D
+ Polulu Metal Gear Micro Motor
+ CNY70 – 74HC14 IC
+ MZ80
MicroMotor

Chasis



CNY70 Sensor Click for the sensor connection details


#test1 – Mar’17
#test2 – Mar’17
#test3 – May’17
Change in the design – Aug’17
Some checks and studies on 4 motor design was done. As a result design change is decided.
New design is built on 2 motors. Robot was deconstructed and re-constructed.
Work’s steps can be found below.







Software Change – Aug’17
Previous software, which can be seen in the videos, was built on “if – while – for” cycles.
Also sensors were being scanned one by one.
With the new software “switch – case” structure is started to be used.
All sensors are being scanned simultaneously* and result is being converted to a math model.
With this change robot started to scan surroundings much more fast and frequent.
* simultaneously means : each sensor is being scanned with 1ms delay in order.
Details will follow



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave A Comment