
SüpürMan is an Arduino based autonomous robot.
At V01 it is planned to drive a vacuum cleaner autonomously.
V01 is built on random scan, mapping will follow in V02.
Current Status (Dec’17)
New Chasis is created in order to carry the vaccum unit with Robot
Motor RPM is decreased from 140 to 30



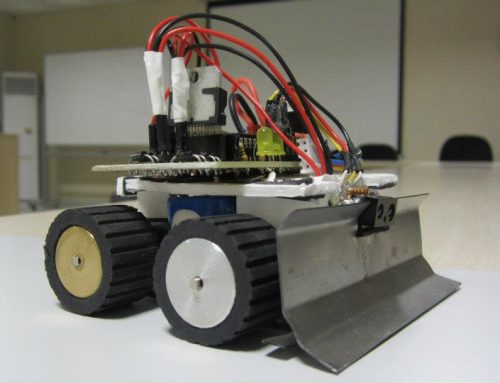
V01-01 / Basic Robot with IR Sensor – May 2016
IR Sensors and motors are used for initial tests of robot.

Trial Video
V01-02 / Basic Robot – Tests with Ultrasonic Sensor
IR sensors are changed with Ultrasonic sensors. Software developing and trials are ongoing.

V01-03 / New Chasis – Nov’16
Chasis design is changed. SketchUp is used for 3D modelling.
Software trials are on-going with new chasis.


Vakum Unit / Jan 2017

Test Video
SüpürMan V01-04 / Adding MicroSwitchs – Jan 2017
In case IR sensors didn’t detect the obstacles, bumpers are detecting. These sensors also have function for the carpet detection.

Test Video
MISC
MicroSwitch Connection

AND gate in order to make more digital sensor connection to Arduino


![Sumo Robot Project [v3]](https://electario.com/wp-content/uploads/2016/05/Robot.jpg)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave A Comment