
Autonom Sumo Robot Projesi – V03 ( 3.Nesil )
SON DURUM
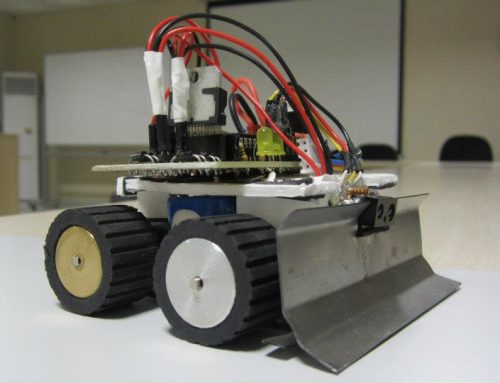
4 tekerli dizayndan 2 tekerli dizayna geçildi(Ağustos 2017), çalışmanın detayları yazının devamında
PROJE’NİN DETAYLARI :
Ekipmanlar
+ Arduino Uno
+ Motor Shield L293D
+ Polulu Metal Gear Micro Motor
+ CNY70 – 74HC14 Entegre
+ MZ80
MikroMotor
Şase



CNY70 Sensor Detaylar için linke tıklayınız


#test1 – Mar’17
#test2 – Mar’17
#test3 – May’17
Dizyan Değişikliği – Aug’17
Araştırmalar ve mevcut dizayn üzerindeki gözlemler sonucu 4 tekerli dizayndan 2 tekerli dizayna geçme kararı aldım. Bu aşamada mevcut robotun sökülüp yeni şasenin oluşturulmasına karar verdim. Aşamalar aşağıdaki gibidir.







Yazılım Değişikliği – Aug’17
Daha önceki videolarda görülen yazılım if – while – for gibi döngülerle oluşturulmuştu.
Ayrıca eski yazılımda sensörler sıra ile taranıyordu.
Yeni yazılımla birlikte “switch – case” yapısına geçildi.
Sensörler ise hep birlikte taranmaya başlandı ve çıkan sonuçşar matematiksel modele dönüştürüldü.
Şu an robot etrafı daha hızlı ve sık tarıyor.
Detaylar Eklenmeye Devam Edecek




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}