
SüpürMan projesi Arduino temelli otonom bir robot projesidir.
V01’de araç süpürgesinin otonom bir şekilde çalışması planlanmaktadır.
V01’de robot etrafı rastgele tarar. Haritalama V02’de geliştirilecek.
Son Durum ( Aralık 17 )
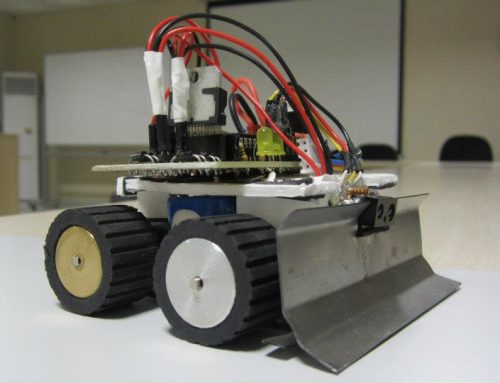
Vakum Ünitesinin Robotun üstüne taşınması için Yeni Şase kesildi
Motorlar 140RPM’den 30RPM’e düşürüldü
Montaj Çalışmaları Devam ediyor



V01-01 / Basit Robot – IR Sensör – Mayıs 2016
Bu işlem için ilk önce IR sensörler ve motorlar yardımı ile robotun otonom gezinmesi için yazılım geliştirilmektedir.
 Deneme Videosu
Deneme Videosu
V01-02 / Basit Robot – Ultrasonik Sensör Ekleme/Testi
IR sensörler Ultrasonik sensörlerle değiştirildi.
Yazılım geliştirme ve deneme çalışmaları devam ediyor…

V01-03 / Yeni Şase – Nov 2016
Şase Dizaynı değiştirildi. 3D modelleme için SketchUp kullanıldı. SketchUp Kesim aşamasında sorun çıkardığı için model Solid Works’e taşındı.
Yazılım geliştirme çalışmaları yeni şase ile birlikte daha stabil bir şekilde yapılmaya başlandı.


Vakum Ünitesi / Ocak 2017

Deneme Videosu
SüpürMan V01-04 / Mikro Switch Ekleme – Ocak 2017
IR sensörün algılamadığı durumlarda (kör noktalar) MicroSwitch ile algılama sağlanmıştır.
Bu özellikle birlikte halıya takılma sorunu çözülmüştür.

Deneme Videosu
MISC
MicroSwitch Bağlantısı

Arduino’ya daha fazla dijital giriş bağlamak için kullanılan AND Kapıları



![MiniSumo Robot Projesi [v3]](https://electario.com/wp-content/uploads/2017/12/img_4182-2-500x383.jpg)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Tebrikler Şahin. Çalışmalarının devamını ve başarılı olmasını dilerim 🙂
Merhaba Taner, Teşekkürler
Güzel bir çalışma olmuş gerçekten. Verilen emeklere değmiş.
Teşekkürler
Amazing! You know I love your blog!!!
Thank you for your comment!